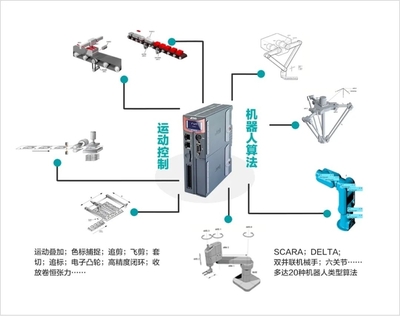
3.台达机器人台达机器人(Delta robot)是一种高速移动机器人,在精确抓取轻物体方面有着突出的表现,尤其是在食品、医药行业的流水线生产中。与硬件相比,机器人运动控制算法更优,机器人路径规划算法是什么?机器人运动控制算法是机器人厂商研发的重点,主要是提高机器人动作的准确性。

1、工业机器人中,拐角半径为零时通常采用哪个指令?
工业机器人类型首先要知道你的机器人会用在什么地方。这是你选择需要购买的机器人类型时的首要条件。如果你只是想要一个小巧的取放机器人,Scara机器人是个不错的选择。如果想快速放置小件物品,台达机器人是最佳选择。如果你希望机器人在工人旁边一起工作,你应该选择合作机器人。下面是一些具体的指标。机器人负载是指机器人工作时所能承受的最大负载。

自由度(轴数)机器人轴数决定其自由度。如果只进行一些简单的应用,比如在传送带之间拾取和放置零件,那么一个4轴机器人就足够了。如果机器人需要在狭窄的空间工作,机械手需要扭转和反转,6轴或7轴机器人是最佳选择。轴数的选择通常取决于具体的应用。需要注意的是,轴多一点不仅仅是为了灵活。事实上,如果你想将机器人用于其他应用,你可能需要更多的轴,而“轴”将被使用得更少。
2、工业机器人的精度包括哪两个指标?
机器人的运动精度是动作过程中的期望轨迹精度;另一个是信号反应时间,实时闭环调节的速度精度。重复定位精度和绝对定位精度。重复定位精度是指机器人重复到达一点时的位置偏差。绝对定位精度表示示教值和实际值之间的偏差。定位精度和重复定位精度。工业机器人的精度表现为重复定位精度和绝对定位精度,绝对定位精度表示示教值与实际值的偏差。重复定位精度是指机器人重复到达一点时的位置偏差。

比如你要求一个轴走100mm,实际走了100.01,多出来的0.01就是定位精度。重复定位精度是指过去两次定位同一位置所产生的误差。比如你让一个轴走100mm,第一次设计,其实他走100.01,重复同样的动作。他走99.99,两者误差0.02,这是重复定位的精度。通常重复定位的精度要比定位的精度高很多。重复定位的精度取决于机器人关节减速器和传动装置的精度。

3、常见的工业机器人
1。SCARA机器人SCARA机器人是一种非常受欢迎的工业机器人。SCARA机器人的名称由“选择性合规装配机器人”的首字母组成。SCARA机器人通常用于自动装配、包装和搬运。它可以在运营中完成很多任务,比如贴标签、组装、取件、入库等。2.前臂机器人前臂机器人是最常见的工业机器人。
前臂机器人可用于各种工业制造业务领域,如搬运、装配、缝纫等。前臂机器人能够按照人类的自然动作进行操作,具有良好的灵活性。3.台达机器人台达机器人(Delta robot)是一种高速移动机器人,在精确抓取轻物体方面有着突出的表现,尤其是在食品、医药行业的流水线生产中。台达机器人也常用于小型零件的组装和打印产品的操作。

4、机器人运动控制算法和硬件哪个好
机器人运动控制算法与硬件相比,机器人运动控制算法更好。机器人运动控制算法是机器人厂商研发的重点,主要是提高机器人动作的准确性、稳定性和速度。机器人硬件不是厂商的研发中心,在里面学到的内容没有机器人运动控制算法那么多,所以机器人运动控制算法比硬件好。
5、机器人路径规划算法是什么?
机器人路径规划算法是路径规划,其目的是在给定的空间内规划一条从起点到目标点的无碰撞路径。移动机器人的路径规划是在其所处的环境中寻找一条从起点到目标点的无碰撞路径,尤其是移动机器人在没有人干预的情况下的自主运动,这就需要将各种智能算法集成到机器人自身的控制系统中,使移动机器人能够自主做出判断和决策。